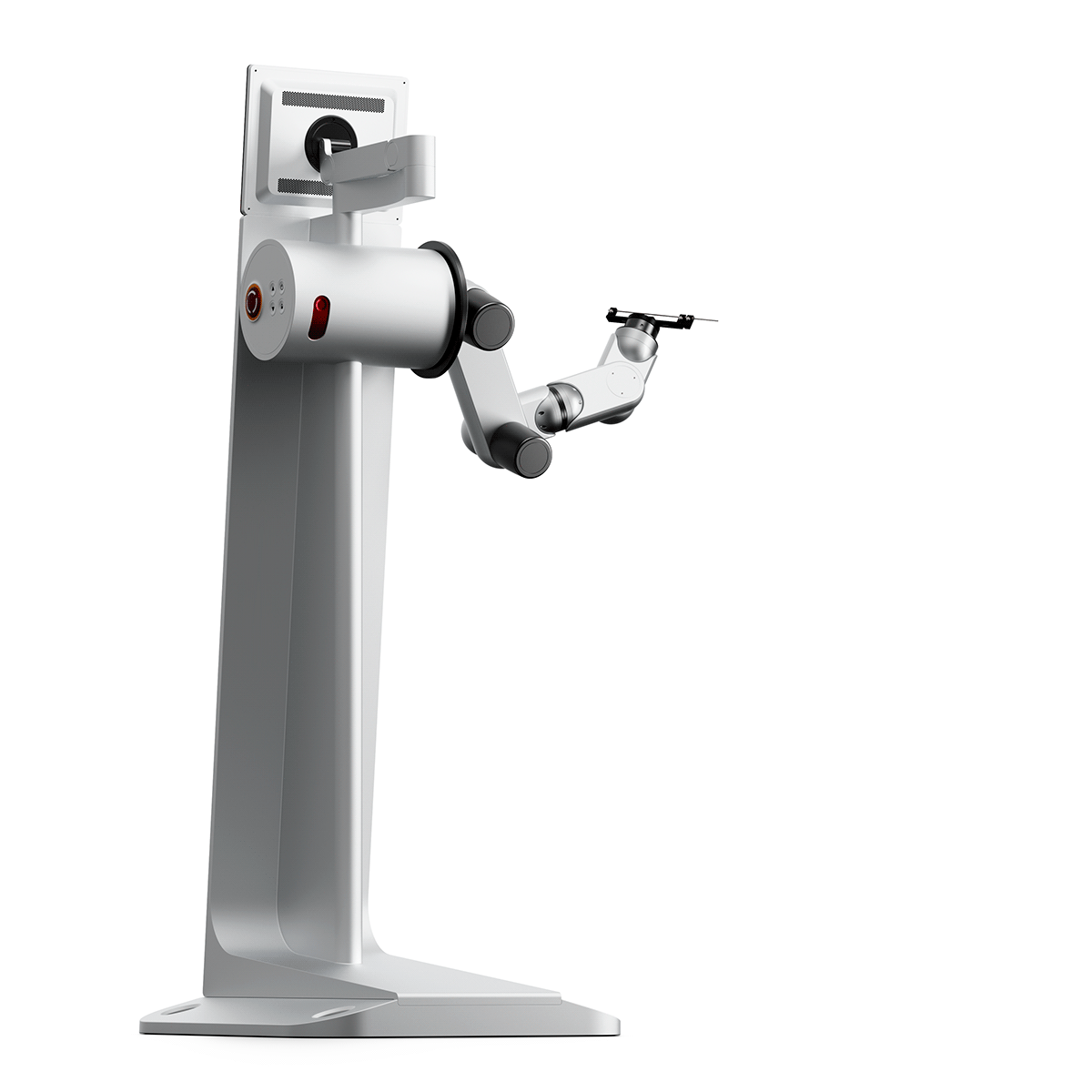
Stereotactic medical robot arm concept

The idea of this project is to create an image of a next-generation medical robot. The relationship between a robot and a human soon will depend on how simple such a complex device will be in perception. One of the goals of the project is to modify existing robots, if production constraints have been minimized

Similar devices mostly have a complex design, which in turn complicates the perception of moving and interactive elements, makes the device less predictable, and interferes with the concentration of attention in such a complex profession as neurosurgery
The simple and clear geometry disposes to quick cleaning of the device from dust, is less prone to breakage, allows service work faster

Open brain surgery requires maximum sterility in everything that is in the operating room. One of the most effective solutions for devices remains the use of a disposable polyethylene barrier. However, the complex design of such devices does not allow you to quickly prepare for the operation. Solving this problem is one of the key tasks of this project

A block with replaceable barrier protection built into the base of the manipulator arm makes it possible to quickly and effectively protect the manipulator from dust and dirt. The block can contain protection of various appearance, depending on the preferences of the owner of this device





The robot can be mounted in the floor of the operating room or moved with the help of special wheels. These wheels are used in many medical devices and have the function of fixing the position
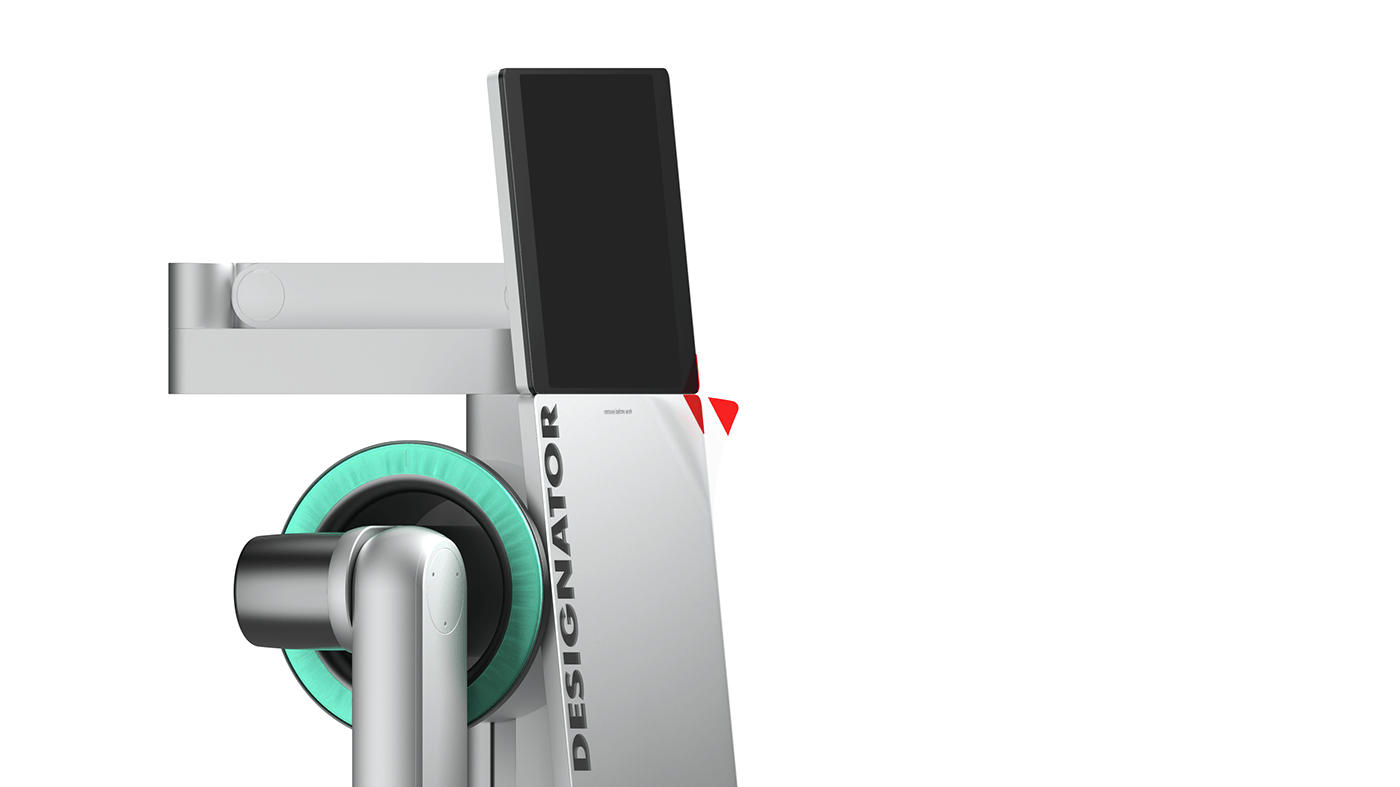
In addition to the barrier protection for the manipulator, the robot has protection for the entire front surface, consisting of many layers of protective film. Instead of lengthy preparation and wrapping the robot with polyethylene structures, it is enough for the assistant to remove one layer of protection

The physical interface is a panel with buttons for controlling basic functions. Detailed control of the manipulator is carried out through the digital interface of the tablet computer

In case of emergency situations when it is necessary to stop the operation and take emergency measures to save the patient, the system provides for an emergency lock of the device in order to quickly move it aside and free up space


